Lec 2. Geometry
Basic geometric entities
Curve
Representations:
Explicit curve:
Implicit curve:
Parametrized curves:
Modeling 1D Curves in 2D
Polylines
Sequence of vertices connected by straight lines.
Useful but not smooth.
Smooth Curves (Splines)
Spline: Smooth curve determined by control points.
Interpolation: Passes through all control points.
Approximation: Does not pass through all points (more stable).
Bézier Curves
Definition:
Given control points , the Bézier curve is:
where is the Bernstein polynomial:
Properties:
Interpolates endpoints (, ).
Tangent to end segments.
Affine transformation invariant.
Convex hull property.
de Casteljau Algorithm:
Recursive linear interpolation to evaluate points on the curve.
Piecewise Bézier Curves
Chain low-order Bézier curves for complex shapes.
Continuity: Shared endpoint.
Continuity: Shared endpoint + tangent continuity.
General Spline Formulation
Definition:
A general spline can be expressed as:
where:
Geometry (): Matrix of control points .
Spline Basis (): Defines the type of spline (e.g., Bernstein for Bézier).
Power Basis (): Monomials .
Different spline types vary in their basis matrix .
Surfaces
Parametrized Surface
Mapping .
Example (Saddle):
Bézier Surfaces
Extend Bézier curves to 2D using control grids.
Evaluation:
- Apply de Casteljau algorithm separately for and .
Explicit Geometric Representations
Taxonomy
Origin-dependent: Scanned data, procedural modeling.
Application-dependent: Storage, rendering, animation.
Multiview 3D
- No explicit 3D geometry; reconstruction required.
Depth Maps
- Incomplete 3D; requires camera info.
Volumetric
- Voxel grids; high memory/computation cost.
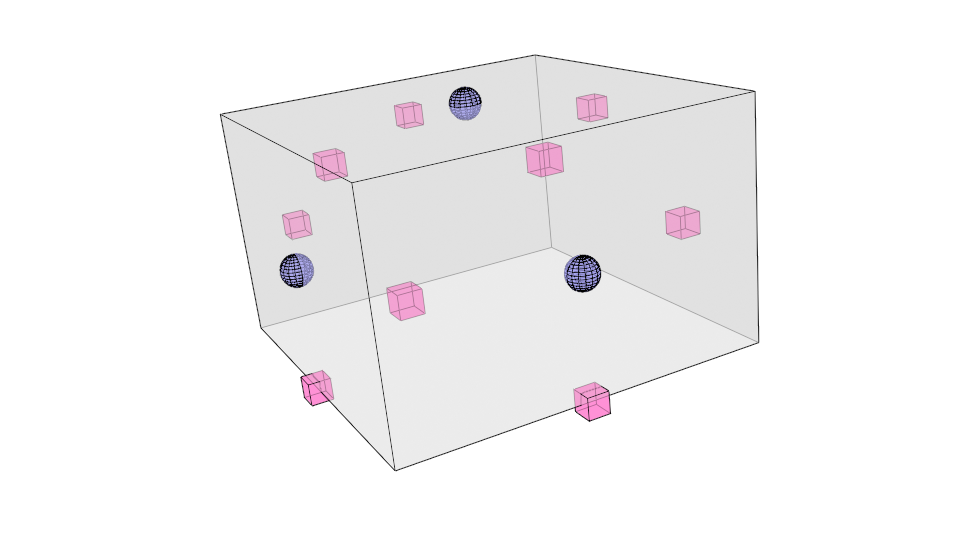
Point Clouds
Unordered set of coordinates (normals).
Acquisition:
3D scanning (LIDAR, Kinect).
Challenges: Noise, occlusion, registration.
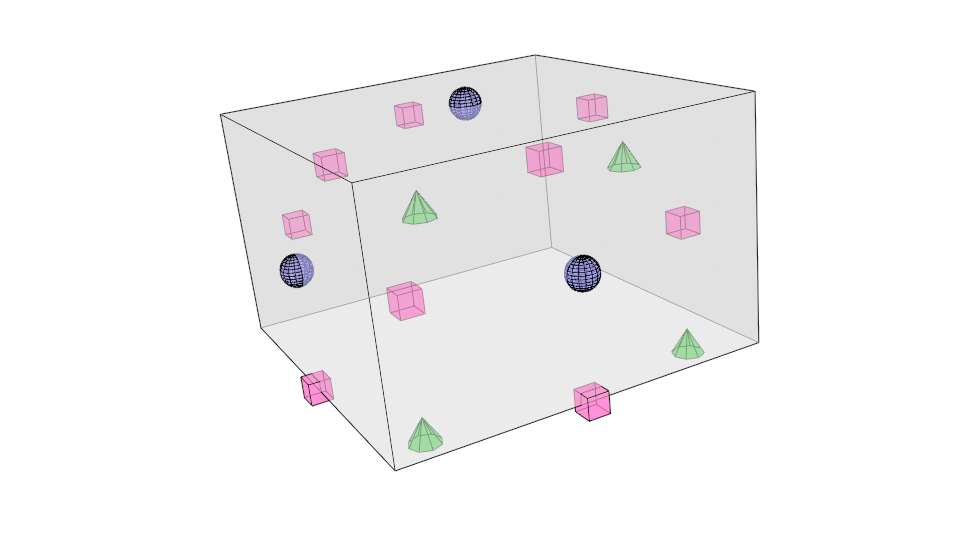
Sampling Methods:
Uniform (i.i.d.).
Farthest Point Sampling (better coverage).
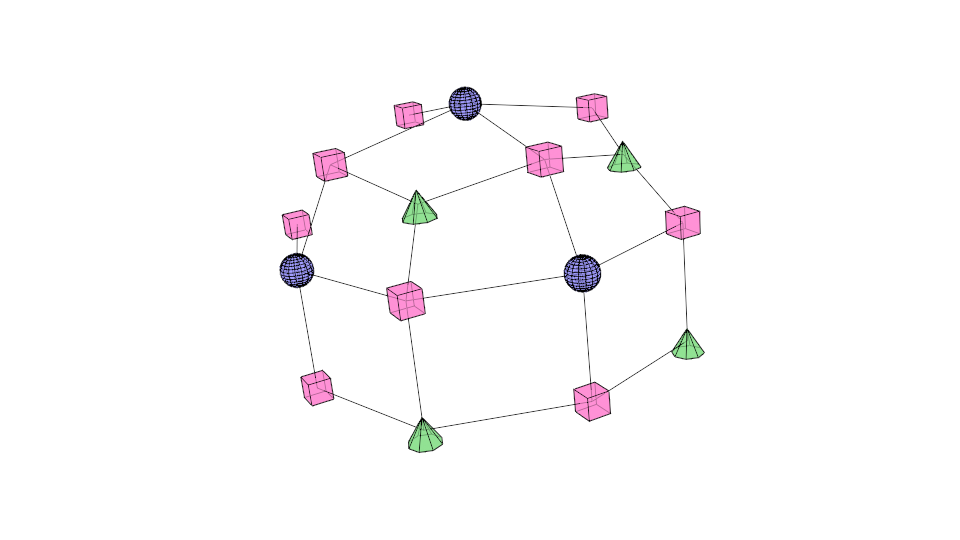
Polygonal Meshes
Triangle Meshes: Most common (simple, planar faces).
Manifold conditions
Each edge is incident to one or two faces
Faces incident to a vertex form a closed or open fan
What Should Be Stored?
Geometry
- 3D coordinates.
Topology
- Connectivity information between vertices, edges, and faces.
Attributes
Normals, colors, texture coordinates.
Per vertex, per face, or per edge.
Data Structures:
Triangle List (STL format).
Storage
- Face: 3 positions
No connectivity information
Indexed Face Set (OBJ, OFF formats).
Storage
Vertex: position
Face: vertex indices
Convention is to save vertices in counter-clockwise order for normal computation
Shared vertices
Mesh Processing:
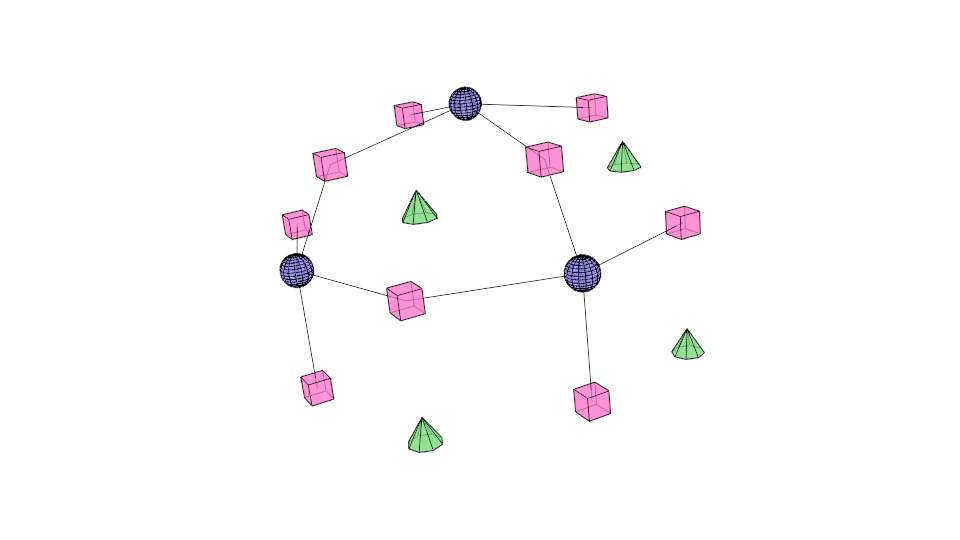
Mesh reconstruction
Input: point cloud
Output: triangle mesh
Explicit Method
Hyper-parameter
Assume a ball of radius cannot pass through the surface without touching the points.
Three points form a triangle if a ball of radius touches them without containing any other points.
Implicit Method
Estimate an implicit field function from data
Extract the zero iso-surface
Watertight manifold surface generation
Many downstream tasks require this
Meshes designed by artists or reconstructed by some algorithms often:
open boundaries
self-intersections
incorrect connectivity
ambiguous face orientations
double surfaces
Huang J, Su H, Guibas L. “Robust watertight manifold surface generation method for ShapeNet models.”
- Small artifacts, all surface have volume (https://github.com/hjwdzh/Manifold)
Huang J, Zhou Y, Guibas L. “ManifoldPlus: A Robust and Scalable Watertight Manifold Surface Generation Method for Triangle Soups.” (https://github.com/hjwdzh/ManifoldPlus)
- Less artifacts, may contain zero-volume structures
Basic steps:
Voxelize the surface
Extracts exterior faces between occupied voxels and empty voxels
Projection-based optimization
Mesh subdivision (upsampling)
Recursive upsampling
Divide mesh element
Calculate new positions of the mesh vertices
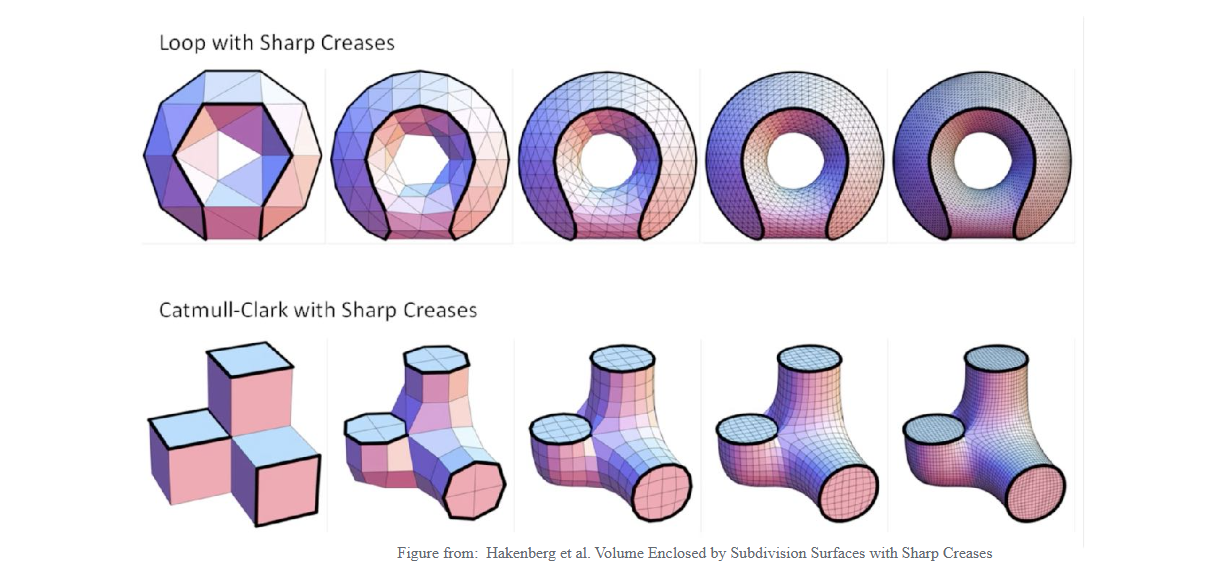
Loop Subdivision
Split each triangle into four
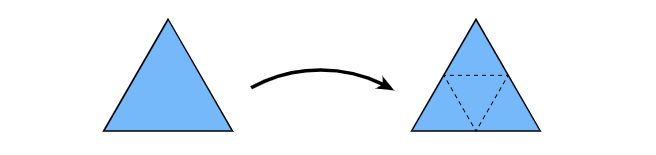
Assign new vertex positions according to weights
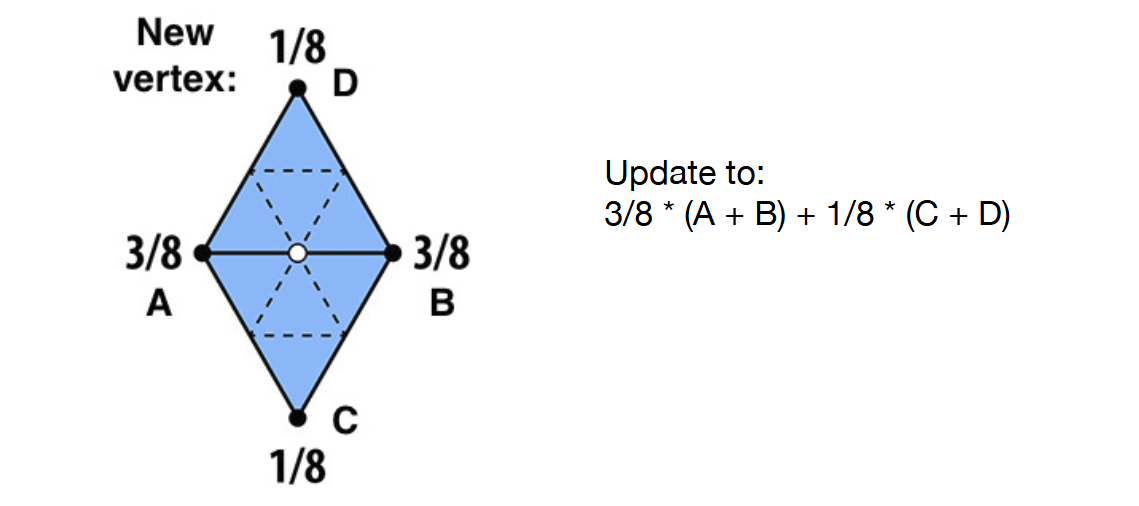
For new vertices
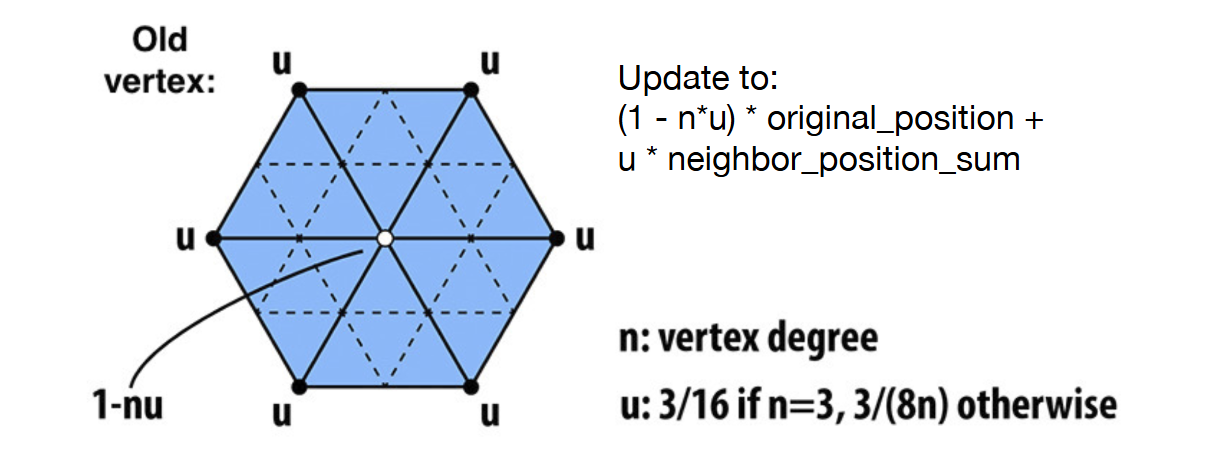
For old vertices
Add a vertex (face point) in each face
Add a vertex (edge point) for each edge
are the face points of the two faces sharing this edge
are the two vertices of this edge
Update each old vertex
is the old vertex position
is the average of face points of faces adjacent to this vertex
is the average of midpoints of edges incident to this vertex
is the valence (degree) of this vertex
Form new edges and faces
Connect each new face point to the new edge points of all original edges defining the original face
Connect each new vertex point to the new edge points of all original edges incident on the original vertex
Define new faces as enclosed by edges
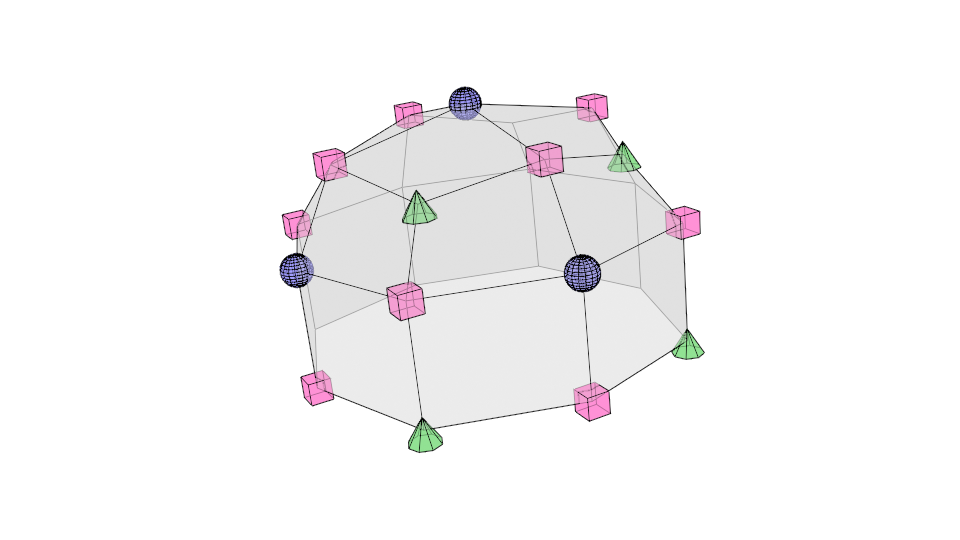
Shape with Creases
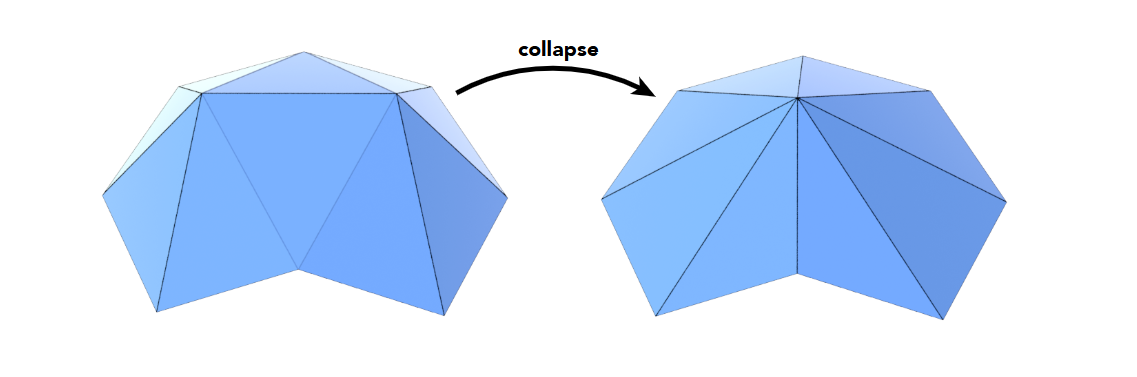
Mesh simplification (downsampling)
Simplify a mesh using edge collapsing
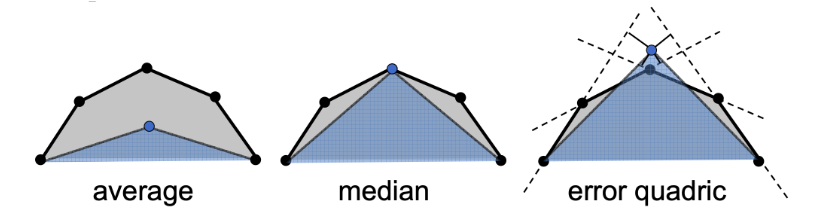
Quadric Error Metrics
Choose point to minimize the sum of squared distances to the planes of the triangles adjacent to the edge being collapsed.
where the set of is all the faces incident to the two endpoints of the original edge.
Which edge to collapse?
Assign score with quadric error metric
Use a priority queue to greedily collapse the edge with the lowest score
Mesh deformation
- Generate new meshes by deforming an existing one
Use deformation energy
Translation and rotation should not change the deformation energy.
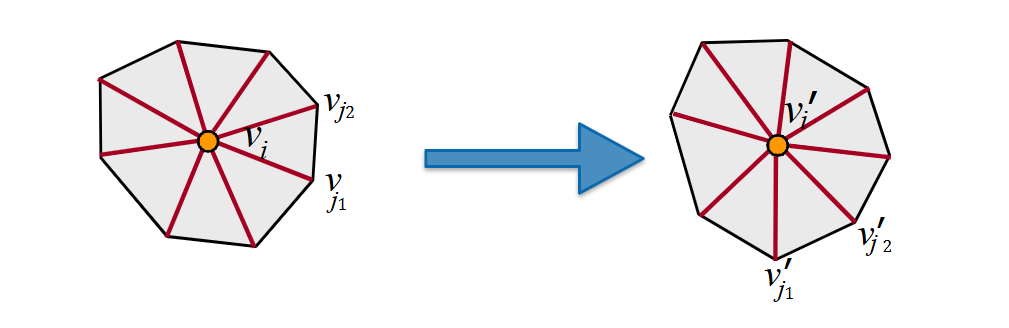
Stretching (length change) and bending (angle change) increase deformation energy.
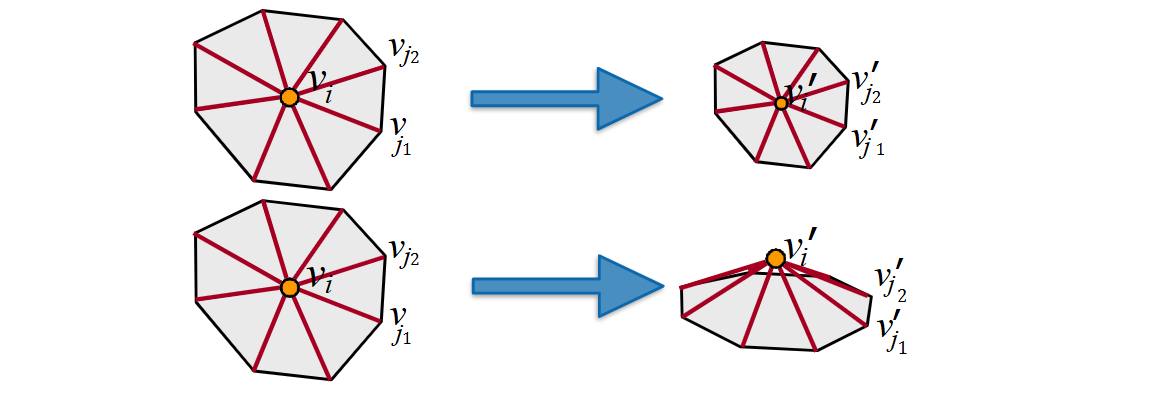
Local Deformation Energy (at vertex )
where is the new position of vertex , is the original position, is the set of neighboring vertices of vertex , is a rotation matrix (shared by cell).
Global Deformation Energy
where is the set of all new vertex positions s.t.
where is the set of constrained vertices (e.g., dragged by user).
Minimizing total deformation energy
- As-Rigid-As-Possible (ARAP) deformation
3D Free-Form Deformation (FFD)
Control points: 3D lattice
Modelers drag the vertices of the lattice to define displacements
Displacements of points in space are computed by interpolating with interpolating weights
Implicit Geometric Representations
Definition: Surface = points where .
Advantages:
Easy inside/outside tests.
Boolean operations (CSG)(construct solid geometry).
Challenges:
- Hard to sample points on surface.
Types:
Algebraic Surfaces
- Polynomial equations (e.g., spheres).
Distance Functions
Giving minimum distance (could be signed distance) from anywhere to object
Instead of booleans, gradually blend surfaces together using distance functions
Level Sets
Closed-form equations are hard to describe complex shapes
store a grid of values approximating function